Když si hraju s tím Arduínem, předělal jsem pohon zadního radaru.
Zde
https://mujtank.tym.cz/viewtopic.php?f= ... ard#p25016
jsem v r.2014 publikoval pohon mechanický.
Byl hlučný a zastavení ve správné poloze se po čase ukázalo jako nepřesné. Velká velikost jazýčkového relé.
Elektronika značně pokročila.
Řízení samozřejmě Arduinem.
Pro přímý náhon vlastního radaru jsem použil krokový motor, průměru 10 mm a k nim miniaturní řadič.
Bylo to docela náročné k odladění, protože motory se dost zahřívaly při trvalém činnosti.
(Režim provozu, chladič, ...)

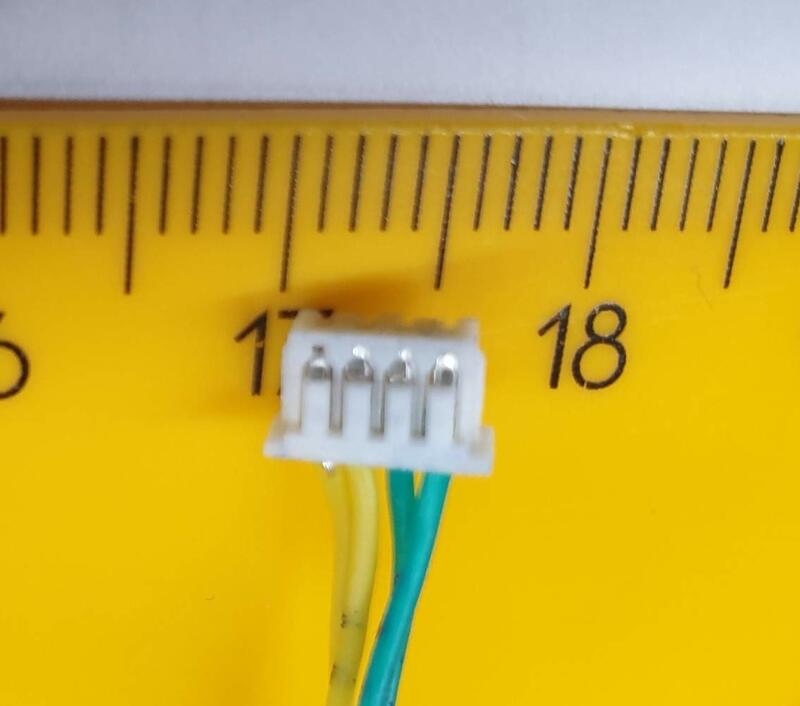
V rámci miniaturizace jsem musel použít kablíky o průměru izolace 0,7 mm a následně i krimpování a pájení konektorů s roztečí 1,25 mm. Otvory pro samečky jsem vrtal souřadnicově vrtákem 0,5 mm.

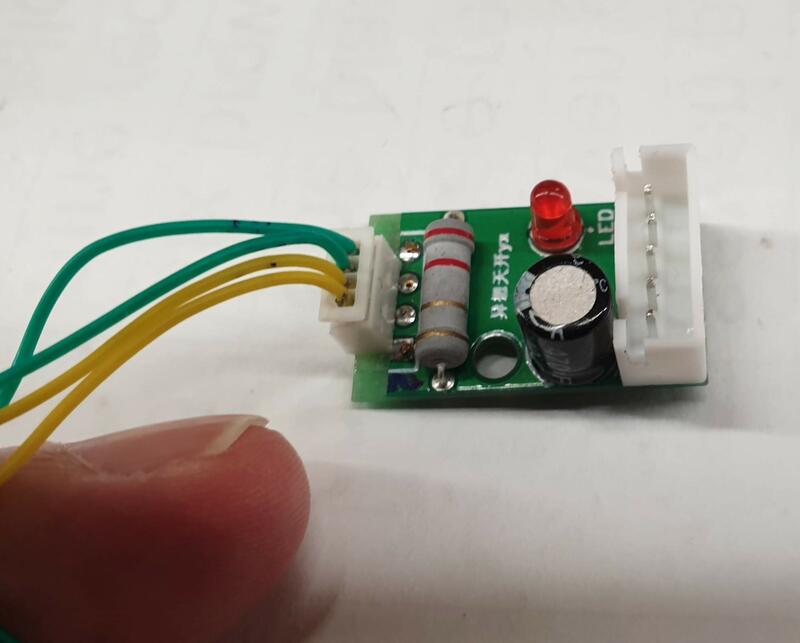
následně jsem musel upravit i řadič
Před sklopením radaru do spodní polohy se otočná část zastaví ve správné poloze díky Hallové sondě.
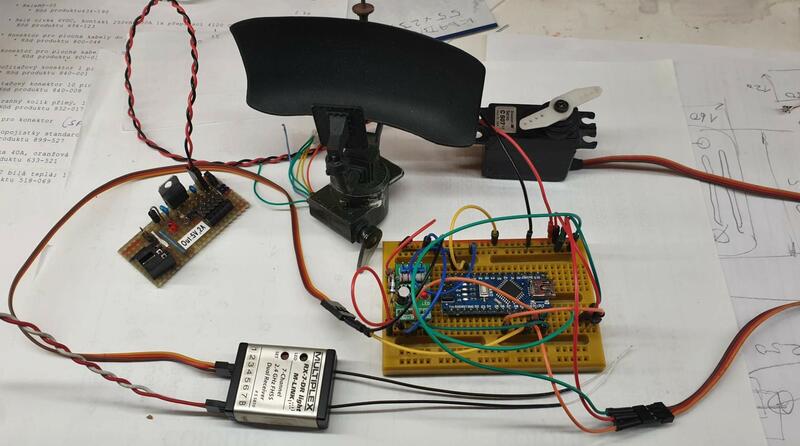
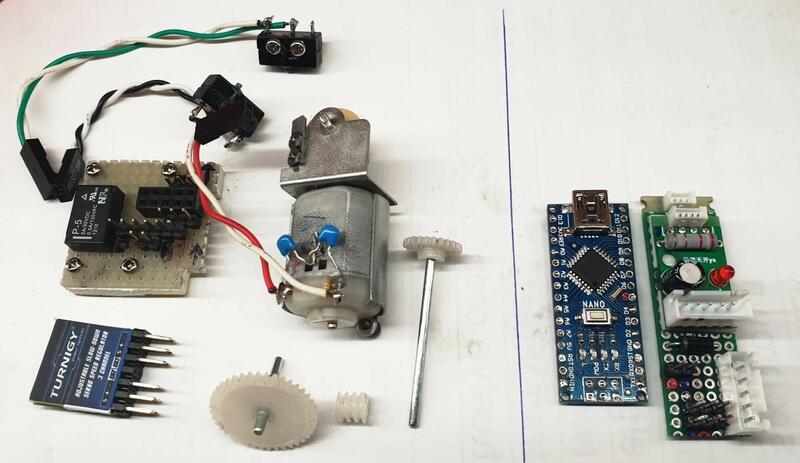
Takto nějak to vypadalo při ladění hardweru i ladění kódu.
Řadič po celkové úpravě

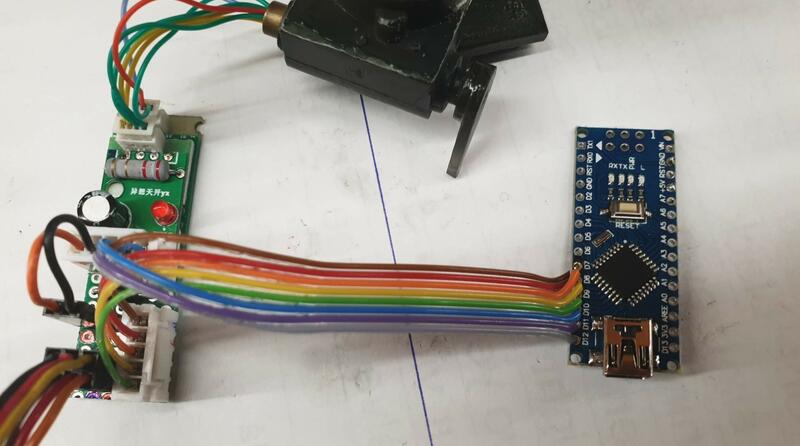
Propojení kabeláží

Porovnání mechanického a elektronického řešení
Upravoval jsem všechny díly Tamiya.
Frézování, soustružení, 3D tisk...
Pokračování..


